About
Robots
 Punk Monkey
Punk Monkey
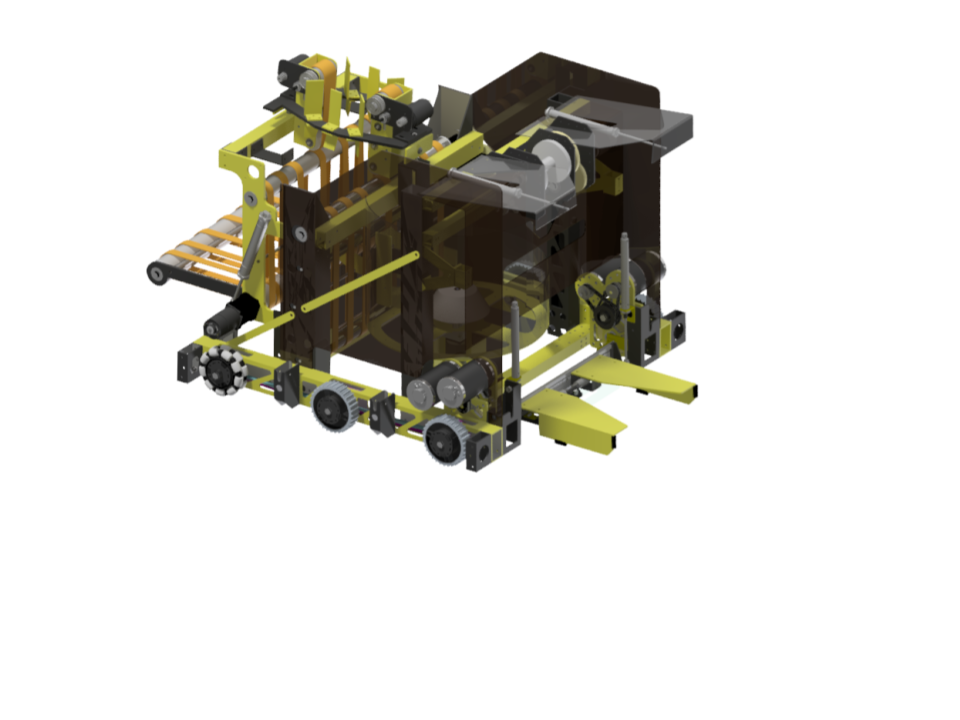
Robot Abilites
Drivetrain: This years drivetrain is a slight variation of our Funky Drive from 2014. This six-wheel drive has a slight center drop on the middle wheel, making it a west coast drive. The front wheels are omni wheels, which reduces turning resistance, and the center wheels are traction wheels, which allows for control. The drive gearbox has motors that hang over the wheels to save space for electronics on the interior. The single speed gearbox can drive the robot up to 15.5 ft/s.
Shooter: This year we tried something new with our shooter, designing a double-sided belt shooter that would pivot to shoot from different angles. From our calculations we found that a belt shooter could transfer more energy into balls while still maintaining a lower profile, when compared to the standard single flywheel hooded design. Another design requirement for the shooter was for it to be able to shoot from the two walls cornering the boiler, as to provide a location for shooting fuel safely into the high goal. We realized that a turret would need to rotate 150 degrees in order to meet this standard, so thus we designed a flip shooter that would have two positions for shooting. Such a flip shooter only needs to move ~30 degrees, ultimately taking up less space than a turret shooter.
Collector: Our collector uses belts to pick up balls from the ground and move them to the ball storage. It also serves as an elevator that lifts balls from the ball storage up to the shooter. A pair of pneumatics deploys the front of the collector outside the robot’s bumpers to collect balls before the robot runs into them.
Gear Collector: Our gear collector uses a pair of clamping surfaces to pick up gears from the ground. It uses one pair of pneumatic cylinders to raise and lower itself, and another pair to open and close the clamp. It uses a linear slide to ensure the clamps slide smoothly, as well as using special friction surfaces to grip the gear as the robot lifts it off the ground.
Climber: Our climber uses velcro to capture the ⅜” nylon rope. A slip knot in the rope allows the climber to gather enough slack before climbing. The gearbox includes a torque limiter that slips when the robot reaches the top of its climb. A ratchet on the output prevents the robot from falling down. In all, it takes around eight seconds to capture the rope and climb, with the actual climb taking four seconds.
Weight: 88 lbs
Height: 24in


